Arm-Z: an extremely modular hyper-redundant low-cost manipulator – development of control methods and efficiency analysis
Abstract
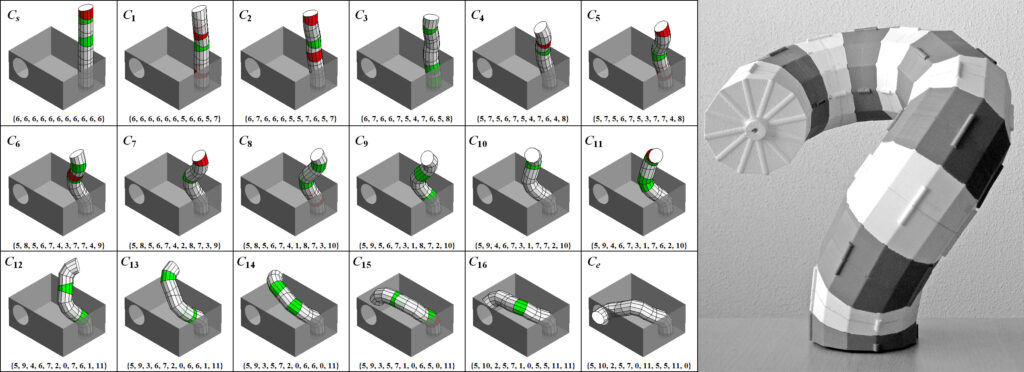
Extremely Modular System (EMS) is a novel approach to design of architectural & engineering forms & structures introduced by the applicant a few years ago EMSs are multidisciplinary and gradually gain attention in various fields of research: architecture, civil & space engineering, structural mechanics & computer science. Advantages of all EMSs: economization (mass-production) robustness (modules which failed can be replaced, also if some fail system can perform certain tasks). Disadvantages: their assembly and control are non-intuitive and difficult. i.e. combining non-trivial congruent units to form meaningful structures or their kinematic actions are computationally expensive. However, due to availability of modern computational power, proposed here approach is rational & competitive. Arm-Z is composed of congruent modules each having one degree of freedom (1-DOF) – a relative twist. Simple changes of these twists result in emerging behavior of the entire Arm-Z allowing it to perform complex movements The relative twists can be continuous or discrete.
Scientific goal
The shape of Arm-Z is a result of: the geometrical parameters of each module, number of modules & their relative rotation Operational space of a discrete Arm-Z (based on polygonal modules & their dihedral relative twists) forms a point-cloud The sizes & thicknesses of these point-clouds grow with the number of modules Moreover, the geometrical parameters of each module influence the properties of the operational space In general, the tip of Arm-Z can not reach all points in 3D space within its range, but can reach specific points with certain accuracy.
The research questions:
- What is the most suitable mathematical description of Arm-Z?
- What are the optimal parameters of the Arm-Z modules for given criteria?
- What is the operational range of Arm-Z & how efficiently can it fill the 3D space around it?
- What is the expected accuracy of control of Arm-Z when considering discrete nature of rotations (step motors)?
- What are the criteria for Arm-Z control:
- Simplicity of control?
- Minimization of wobbling of the entire Arm-Z?
- Maximization of „smoothness” of translation of the tip?
- Which control methods are suitable for Arm-Z (PID-based control, reinforced-learning, meta-heuristic)?
- What are the physical & mechanical limits regarding stability & strength of the „chain” of Arm-Z modules:
- How are they related to local internal structure of the base module?
- What are the requirements for Arm-Z module joints in order to bear expected loads?
- Such joints must also support quick release & assembly.
- How does the system cope with vibration, stress & deformation?
- What are the potential applications of Arm-Z especially for responsive (kinetic) architecture?
Impact of the project
Arm-Z belongs to the family of EMSs and represents a novel design philosophy. The first EMS has been introduced in 2011. Since then a number of new EMSs have been introduced & the concept is gradually and steadily gaining attention in the research community in various disciplines: architecture, civil & space engineering, structural mechanics & computer science. Accordingly, the proposed project is also multidisciplinary & contributes to the research in the following fields:
- Control theory of hyper-redundant manipulators. This field of research is unexplored. Due to specific, modular nature of the problem, classic control approaches are inefficient & researchers look for alternatives: artificial intelligence (neural networks, reinforcement learning) or heuristic methods
- The results will contribute to the development of new approaches in discrete-continuous control of multibody systems.
- New applications of artificial intelligence & heuristic optimization to control the shape transition:
- Since real-time operational regime is desired, novel implementations of massively parallel platforms are planned (e.g. with GPU)
- Application of reinforcement learning for control of Arm-Z
- Structural mechanics:
- Development a framework for consistent hierarchical representation of modular structures that exploits the congruence of units
- Application of this framework to topological optimization of modular structures at the local level of the congruent unit
- Theory of design:
- Introduction of extremely modular kinetics for responsive architectural & engineering design.